
The Control System Toolbox provides commands for creating 4 basic types of linear time-invariant (LTI) models:
These functions take model data as input and return objects which embody this data in a single MATLAB variable.
where:


The numerator and denominator polynomials define a transfer function model.
A vector of coefficients specifies the polynomials. For example
[ 1, 2, 10 ]
would specify the polynomial

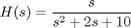
You can create a SISO transfer function model by specifying its numerator and denominator polynomials as inputs to the TF command:
num = [ 1 0 ]; % Numerator: s den = [ 1 2 10 ]; % Denominator: s^2 + 2 s + 10 H = tf(num,den);
You can also specify this model as a rational expression of s:
s = tf('s'); % Create Laplace variable H = s / (s^2 + 2*s + 10);

where



Zero-pole-gain models are the factored form of transfer function models.
In this format, the gain k, zeros z (numerator roots), and poles p (denominator roots) characterize the model.

You can specify a SISO zero-pole-gain model using the ZPK command:
z = 0; % Zeros p = [ 2 1+i 1-i ]; % Poles k = -2; % Gain H = zpk(z,p,k);
You can also specify this model as a rational expression of s:
s = zpk('s');
H = -2*s / (s - 2) / (s^2 - 2*s + 2);


where



State-space models are constructed from the linear differential or difference equations describing the system dynamics.
The state-space matrices A, B, C, and D characterize these models.
The following describes a simple electric motor.
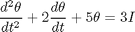
where


The relations below describe the relationship between the driving current (input) and the angular displacement of the rotor (output) in state-space form.


% % You can use the SS command to create the state-space model of this system % in MATLAB: A = [ 0 1 ; -5 -2 ]; B = [ 0 ; 3 ]; C = [ 1 0 ]; D = 0; H = ss(A,B,C,D);
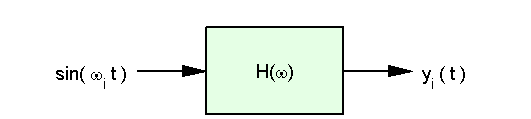
Frequency response data, FRD, models allow you to store the measured or simulated complex frequency response of a system in an LTI object. You can then analyze the model using the Control System Toolbox.
Given a vector of frequencies and a vector of system responses to excitation at these frequencies,
From input 1 to:
Frequency(Hz) output 1
------------- --------
1000 -0.8126-0.0003i
2000 -0.1751-0.0016i
3000 -0.0926-0.4630iyou can construct an FRD model with this data using the FRD command:
freq = [1000 ; 2000 ; 3000]; % measured in Hz resp = [-0.8126-0.0003i ; -0.1751-0.0016i ; -0.0926-0.4630i]; H = frd(resp,freq,'Units','Hz');
The last 2 arguments in this example are used to indicate that the frequency units are in Hertz. The MATLAB output is shown above.