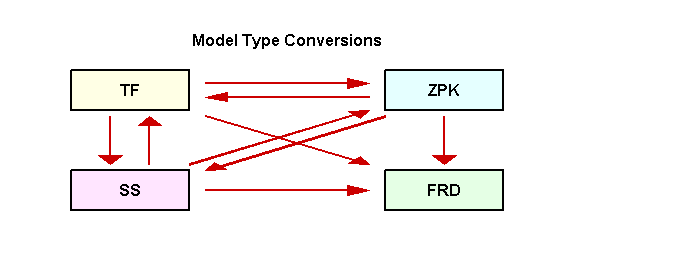
The Control System Toolbox allows you to convert LTI models from one type to another, as shown below.
>> sys = tf(sys) % Conversion to TF
>> sys = zpk(sys) % Conversion to ZPK
>> sys = ss(sys) % Conversion to SS
>> sys = frd(sys,frequency) % Conversion to FRD
Note that you cannot convert FRD models to the other model types and that conversion to FRD requires a frequency vector as input.
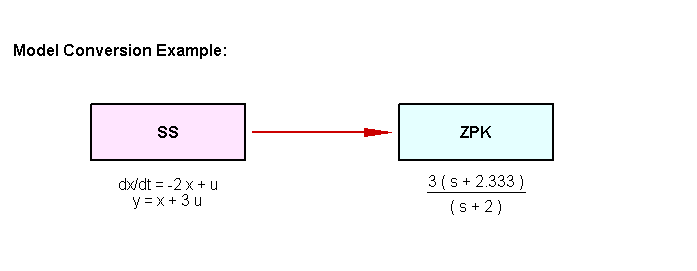
For example, you can convert the state-space model
sys = ss(-2,1,1,3);
to a zero-pole-gain model using
sys = zpk(sys);
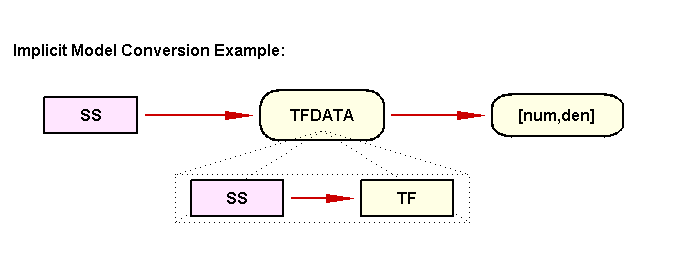
Some algorithms operate on only one type of LTI model. For convenience, such commands automatically convert LTI models to the appropriate or required model type. For example, in
sys = ss(0,1,1,0); [num,den] = tfdata(sys);
the function TFDATA internally converts the state-space model sys to an equivalent transfer function model in order to obtain its numerator and denominator data.