The clutch system in this example consists of two plates that transmit torque between the engine and transmission. There are two distinct modes of operation; slipping, where the two plates have differing angular velocities; and lockup, where the two plates rotate together. Handling the transition between these two modes presents a modeling challenge. As the system loses a degree of freedom upon lockup, the transmitted torque goes through a step discontinuity. The magnitude of the torque drops from the maximum value supported by the friction capacity to a value that is necessary to keep the two halves of the system spinning at the same rate. The reverse transition, break-apart, as the torque transmitted by the clutch plates exceeds the friction capacity, is also challenging.
There are two methods for solving this type of problem:
Simulink can model either method. In this example, we describe a simulation for the second method. In the second method, switching between two dynamic models must be performed with care to ensure that the initialized states of the new model match the state values immediately prior to the switch. In either approach, Simulink facilitates accurate simulation due to its ability to recognize the precise moments at which transitions between lockup and slipping occur.
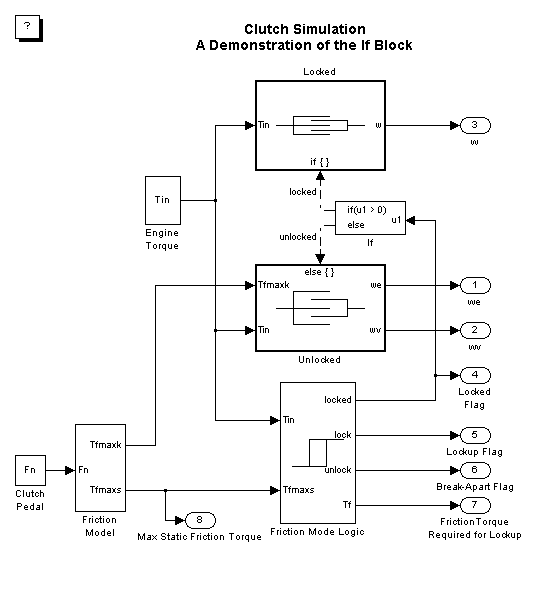
This demonstration shows how to use if/else subsystems to build a clutch model. An If subsystem models the clutch dynamics in the locked position while an else subsystem models the unlocked position. One or the other of the subsystems is enabled via the If block. The dot-dashed lines from the If block denote control signals, used to enable if/else (or other conditional) subsystems.
A detailed review of the equations used in this design can be found in the white paper Using Simulink and Stateflow for Automotive Examples. Please note that this paper is based on an older version of Simulink and does not use all the newest block diagramming features in the current version of Simulink.